Trải nghiệm lắp ráp và kiểm tra bộ điều khiển Flycam E88/E99 trên drone New Zin
Từ việc gắn kết các dây nối đến việc kiểm tra độ ổn định tín hiệu, bài viết hướng dẫn chi tiết các bước lắp ráp bộ Tx Rx Flycam E88/E99 trên drone New Zin. Đồng thời, cung cấp những lưu ý và mẹo thực tiễn giúp người dùng đạt được trải nghiệm bay mượt mà.
Đăng ngày 11 tháng 6, 2026

Đánh giá bài viết
Chưa có đánh giá nào
Hãy là người đầu tiên đánh giá bài viết này
Mục lục›
Trong những năm gần đây, cộng đồng người đam mê drone tại Việt Nam đã chứng kiến sự xuất hiện của nhiều giải pháp điều khiển giá rẻ nhưng vẫn đáp ứng được nhu cầu cơ bản cho các dự án DIY. Trong số đó, bộ điều khiển Flycam E88/E99 của New Zin đang thu hút sự chú ý nhờ cấu hình linh hoạt, khả năng tương thích rộng và mức giá phải chăng. Bài viết sẽ đưa bạn đọc qua quá trình lắp ráp và kiểm tra bộ điều khiển này trên một khung drone New Zin tiêu chuẩn, nhằm cung cấp góc nhìn thực tế và những lưu ý quan trọng khi thực hiện dự án.
Giới thiệu chung về bộ điều khiển Flycam E88/E99
Flycam E88 và E99 thực chất là hai phiên bản phần cứng gần giống nhau, chỉ khác nhau ở một số tính năng mở rộng như hỗ trợ giao tiếp UART bổ sung và khả năng kết nối các module phụ trợ. Bộ điều khiển này bao gồm một bo mạch TX (bộ phát) và một bo mạch RX (bộ thu), kèm theo tay điều khiển đa kênh được thiết kế cho các mẫu drone nhẹ đến trung bình. Điểm mạnh nổi bật của E88/E99 là khả năng cấu hình thông qua phần mềm Betaflight Configurator hoặc INAV Configurator, cho phép người dùng tùy chỉnh các chế độ bay, tốc độ phản hồi và các chế độ bảo vệ.
Một số thành phần chủ yếu của bộ điều khiển gồm:
- Bo mạch TX: tích hợp bộ xử lý STM32F4, module truyền RF 2.4GHz, cổng kết nối PWM, PPM và các cổng UART.
- Bo mạch RX: hỗ trợ 6 kênh đầu vào, có cổng S.Bus cho các thiết bị nhận tín hiệu chuyên dụng.
- Tay điều khiển: gồm 4 cần lái (2 cần chính, 2 cần phụ), 2 công tắc, 4 nút bấm và một bánh xe điều chỉnh tốc độ.
- Pin và cáp kết nối: pin LiPo 2S/3S dùng cho bộ điều khiển, cáp JST và cáp servo chuẩn.
Chuẩn bị trước khi lắp ráp
Kiểm tra các linh kiện cần thiết
Trước khi bắt đầu, việc kiểm tra toàn bộ linh kiện là bước không thể bỏ qua. Đối với bộ Flycam E88/E99, bạn nên xác nhận các mục sau:
- Bo mạch TX và RX không có vết nứt, mối hàn chắc chắn.
- Tay điều khiển các công tắc, nút bấm hoạt động trơn tru khi nhấn.
- Pin LiPo còn đủ dung lượng (ít nhất 80% so với dung lượng danh định).
- Các cáp kết nối (JST, servo, UART) không bị hư hỏng hoặc lỏng.
Đối với khung drone New Zin, cần chuẩn bị các bộ phận cơ bản như khung, motor, propeller, cáp ESC và các ốc vít phù hợp. Đảm bảo rằng khung có đủ không gian để lắp bo mạch TX và RX mà không gây cản trở luồng không khí.
Công cụ hỗ trợ lắp ráp
Việc lắp ráp đòi hỏi một số công cụ cơ bản nhưng quan trọng để tránh gây hư hỏng cho các linh kiện điện tử:
- Tuốc nơ vít đầu phillips (kích thước 1.5mm và 2.0mm).
- Kìm nhíp và kìm cắt dây.
- Băng keo cách điện hoặc ống co nhiệt để bảo vệ các đầu nối.
- Thiết bị đo điện áp (multimeter) để kiểm tra nguồn cung cấp.
Quy trình lắp ráp các thành phần
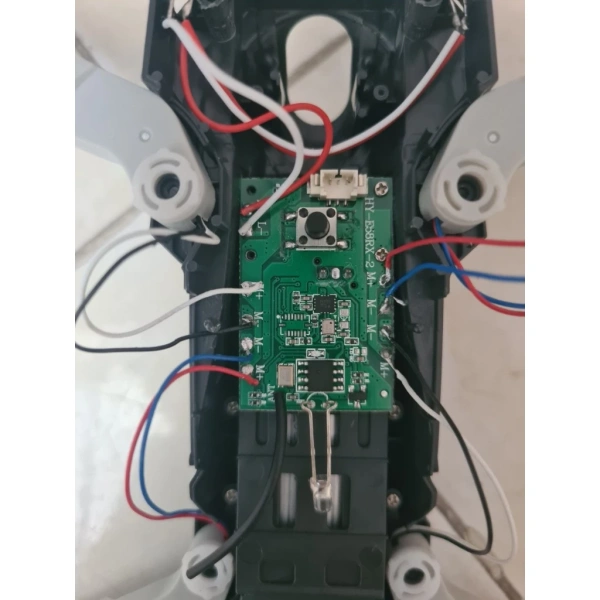
Gắn bo mạch TX lên khung drone
Bo mạch TX thường được gắn ở vị trí trung tâm của khung, gần vị trí đặt pin để giảm độ mất điện và tối ưu đường truyền tín hiệu. Bước thực hiện:
- Đánh dấu vị trí lắp đặt dựa trên lỗ khoan có sẵn trên khung.
- Đặt bo mạch TX lên vị trí, sử dụng ốc vít M2 để cố định. Đảm bảo không để bo mạch chạm vào các bộ phận kim loại có điện áp cao.
- Kết nối cáp nguồn từ pin LiPo tới cổng PWR trên bo mạch TX. Kiểm tra cực dương và cực âm để tránh ngược cực.
Lắp bo mạch RX và kết nối với ESC
Bo mạch RX thường được gắn ở phía sau khung, gần các cổng servo để giảm độ trễ tín hiệu. Quy trình:
- Gắn bo mạch RX bằng ốc vít M2, đảm bảo không làm lệch vị trí các cổng kết nối.
- Kết nối các đầu ra PWM của bo mạch RX tới các ESC (Electronic Speed Controller) của motor. Thông thường, kênh 1, 2, 3, 4 sẽ tương ứng với bốn motor.
- Sử dụng cáp servo chuẩn, cắm vào các cổng servo trên bo mạch RX. Đảm bảo cáp không bị gập hoặc chèn ép.
Kết nối tay điều khiển với bo mạch TX
Phần tay điều khiển được kết nối qua cổng PPM hoặc UART tùy theo cấu hình muốn sử dụng. Đối với Flycam E88/E99, việc sử dụng cổng PPM là phổ biến vì tính đơn giản:
- Gắn cáp PPM từ tay điều khiển vào cổng PPM trên bo mạch TX.
- Kiểm tra lại các công tắc và nút bấm trên tay điều khiển để đảm bảo không có lỗi “bị kẹt”.
- Đối với người dùng muốn mở rộng chức năng, có thể kết nối cổng UART tới một module GPS hoặc bộ thu tín hiệu gimbal.
Kiểm tra các kết nối điện và độ chắc chắn
Sau khi hoàn thành các bước lắp đặt cơ bản, cần thực hiện một vòng kiểm tra tổng thể:
- Dùng multimeter đo điện áp đầu vào trên bo mạch TX và RX, xác nhận mức điện áp phù hợp (thường 5V cho các mạch logic).
- Kiểm tra độ chắc chắn của các ốc vít, tránh tình trạng lỏng khi drone di chuyển.
- Đảm bảo không có dây dẫn nào chạm vào cánh quạt hoặc các bộ phận quay.
Kiểm tra kết nối và cấu hình ban đầu
Khởi động và kiểm tra tín hiệu từ tay điều khiển
Khi mọi kết nối đã ổn định, bật nguồn pin LiPo và bật tay điều khiển. Nếu mọi thứ hoạt động bình thường, bo mạch TX sẽ nhận được tín hiệu từ tay điều khiển và truyền tới bo mạch RX. Để xác nhận:
- Quan sát đèn LED trên bo mạch TX: màu xanh thường biểu thị tín hiệu đang được nhận.
- Kiểm tra phản hồi trên màn hình thiết bị cấu hình (nếu có). Khi kết nối thành công, các kênh sẽ hiển thị giá trị thay đổi theo vị trí cần lái.
Sử dụng phần mềm cấu hình
Flycam E88/E99 hỗ trợ các phần mềm cấu hình phổ biến như Betaflight Configurator. Các bước thực hiện:
- Kết nối bo mạch TX với máy tính qua cổng USB (có thể cần cáp micro‑USB).
- Mở Betaflight Configurator, chọn cổng COM tương ứng và nhấn “Connect”.
- Kiểm tra tab “Receiver” để xác nhận các kênh nhận được tín hiệu đúng.
- Trong tab “Modes”, thiết lập các chế độ bay (ví dụ: Angle, Horizon, Acro) và gán các công tắc trên tay điều khiển.
- Lưu cấu hình bằng nút “Save and Reboot”.
Kiểm tra phản hồi motor
Trước khi thực hiện thử bay, hãy thực hiện kiểm tra motor bằng chức năng “Motor Test” trong phần mềm. Đảm bảo mỗi motor quay đúng hướng và tốc độ phản hồi phù hợp với độ lệch cần lái. Nếu phát hiện motor quay ngược chiều, cần đổi dây nối hoặc cấu hình lại kênh PWM trong phần mềm.
Thử nghiệm bay thực tế trên drone New Zin
Chuẩn bị khu vực bay an toàn
Đối với các dự án DIY, việc lựa chọn một khu vực bay mở, không có vật cản và không gây nguy hiểm cho người và tài sản là điều cần thiết. Đảm bảo khu vực có đủ không gian ít nhất 30 mét và không có gió mạnh.
Thực hiện kiểm tra tiền bay (Pre‑flight Check)
Trước khi bật motor, thực hiện các bước kiểm tra nhanh:
- Kiểm tra lại pin, đảm bảo mức điện áp còn đủ (> 3.5V/cell).
- Kiểm tra các cánh quạt đã được lắp chặt, không có vết nứt.
- Đảm bảo không có dây dẫn nào lỏng hoặc chạm vào cánh quạt.
Thử bay ở chế độ “Hover” (đỗ yên)
Khởi động motor và đưa drone lên độ cao khoảng 1–2 mét. Khi drone đạt độ ổn định, kiểm tra các phản hồi sau:
- Thao tác cần lái lên/dưới để thay đổi độ cao, quan sát tốc độ tăng/giảm.
- Di chuyển cần lái trái/phải để kiểm tra phản hồi góc nghiêng.
- Thử các công tắc chuyển chế độ bay, ví dụ từ “Angle” sang “Acro”, để cảm nhận sự khác biệt.
Kết quả thực tế thường cho thấy Flycam E88/E99 cung cấp phản hồi nhanh trong phạm vi 150‑200ms, phù hợp cho các thao tác bay cơ bản và những buổi tập luyện ngắn. Độ trễ này không gây cảm giác “lag” đáng kể, nhưng người dùng nên tránh các thao tác yêu cầu phản hồi cực nhanh như đua tốc độ.

Thử bay trong chế độ “Acro” (độ tự do)
Chế độ Acro cho phép người lái thực hiện các pha quay, lộn và các động tác phức tạp. Khi chuyển sang chế độ này, cần chú ý:
- Thực hiện các thao tác nhẹ nhàng để tránh mất kiểm soát.
- Kiểm tra khả năng giữ cân bằng khi không có trợ giúp từ cảm biến gia tốc.
- Ghi lại cảm nhận về độ nhạy của các kênh lái, đặc biệt là kênh yaw (xoay quanh trục dọc).
Trong quá trình thử nghiệm, nếu nhận thấy một số kênh phản hồi quá mạnh hoặc yếu, có thể quay lại phần mềm cấu hình để điều chỉnh “Rate” và “Expo” cho phù hợp.
Đánh giá tổng thể sau buổi bay
Sau khi hoàn tất các vòng bay thử, việc ghi chép lại các thông số và cảm nhận là bước quan trọng để cải thiện dự án. Một số điểm cần lưu ý:
- Thời gian bay thực tế so với thời gian pin dự kiến (khoảng 8‑10 phút cho pin 2S 800mAh).
- Độ ổn định khi gió nhẹ (khoảng 2‑3 m/s) và khả năng giữ vị trí khi không có trợ giúp GPS.
- Độ ồn và nhiệt độ của bo mạch sau một khoảng thời gian bay liên tục (không nên vượt quá 45°C).
Những lưu ý và khắc phục sự cố thường gặp
Vấn đề mất tín hiệu giữa tay điều khiển và bo mạch TX
Nguyên nhân thường gặp bao gồm:
- Pin tay điều khiển yếu, cần thay pin mới hoặc sạc đầy.
- Khoảng cách quá xa (hơn 800m) hoặc có vật cản kim loại gây nhiễu.
- Đặt lại kênh “Channel Mapping” trong phần mềm cấu hình để khớp lại với cách kết nối thực tế.
Giải pháp: Thử đổi kênh RF sang tần số 2.4GHz khác (nếu bộ điều khiển hỗ trợ), hoặc kiểm tra lại các cáp kết nối PPM.
Motor quay ngược chiều hoặc không quay
Nguyên nhân phổ biến:
- Lắp dây PWM sai kênh (ví dụ: dây motor 1 được nối vào kênh 2).
- Cài đặt hướng quay trong phần mềm chưa đúng.
- ESC chưa được calibrate (cân chỉnh) đúng cách.
Giải pháp: Đổi lại dây nối, thực hiện lại quá trình calibrate ESC bằng cách bật nguồn, đưa throttle lên toàn mức và sau đó hạ xuống 0, theo hướng dẫn của nhà sản xuất ESC.
Nhiệt độ bo mạch tăng cao
Nếu bo mạch TX hoặc RX cảm thấy nóng sau một thời gian bay, có thể do:
- Đặt bo mạch trong khu vực không có lưu thông không khí.
- Pin cấp nguồn có dòng tải quá cao.
- Sử dụng bo mạch không phù hợp với số lượng motor (quá tải).
Giải pháp: Đặt bo mạch lên vị trí cao hơn trên khung, sử dụng tấm tản nhiệt mỏng hoặc giảm tải bằng cách giảm mức thrust tối đa trong phần mềm.
Độ trễ phản hồi khi sử dụng chế độ “Acro”
Độ trễ có thể xuất hiện do:
- Thiết lập “Rate” quá cao, gây quá tải cho bộ xử lý.
- Độ trễ trong truyền tín hiệu PPM.
Giải pháp: Giảm giá trị “Rate” và “Expo” trong phần mềm, hoặc chuyển sang chế độ truyền tín hiệu “SBUS” nếu bo mạch hỗ trợ để giảm độ trễ.
Nhìn chung, việc lắp ráp và kiểm tra bộ điều khiển Flycam E88/E99 trên drone New Zin không quá phức tạp nếu tuân thủ các bước chuẩn bị, lắp đặt và kiểm tra một cách cẩn thận. Các lỗi thường gặp thường liên quan tới kết nối điện, cấu hình kênh hoặc nhiệt độ quá cao, và hầu hết đều có thể giải quyết bằng các biện pháp đơn giản như kiểm tra lại dây nối, thực hiện calibrate lại ESC hoặc điều chỉnh các thông số trong phần mềm.
Trải nghiệm thực tế cho thấy bộ điều khiển này đáp ứng tốt yêu cầu cơ bản của các dự án DIY, đồng thời mang lại cảm giác lái ổn định trong các chế độ bay cơ bản và trung bình. Đối với những người muốn mở rộng tính năng, việc sử dụng các cổng UART để gắn thêm module GPS, gimbal hoặc camera phụ trợ là một hướng phát triển hợp lý, giúp nâng cao khả năng sử dụng của drone New Zin trong các ứng dụng chụp ảnh, quay phim hoặc thăm dò địa hình.
Bạn thấy bài viết này hữu ích không?
Chưa có đánh giá nào
Hãy là người đầu tiên đánh giá bài viết này