Thực tế khi bỏ qua cấu hình PHY trong module Ethernet RJ45 cho Arduino khiến kết nối không ổn định
Bạn đã từng gặp phải tình huống, sau khi đưa board Arduino kết nối tới mạng qua RJ45, dữ liệu truyền bị gián đoạn, tốc độ chậm bất chợt hoặc thậm chí mất kết nối hoàn toàn? Thường thì nguyên nhân không phải do lỗi phần cứng mà chính là việc bỏ qua một bước quan trọng: cấu hình PHY (Physical Layer).…
Đăng ngày 2 tháng 5, 2026
Đánh giá bài viết
Chưa có đánh giá nào
Hãy là người đầu tiên đánh giá bài viết này
Mục lục›
Bạn đã từng gặp phải tình huống, sau khi đưa board Arduino kết nối tới mạng qua RJ45, dữ liệu truyền bị gián đoạn, tốc độ chậm bất chợt hoặc thậm chí mất kết nối hoàn toàn? Thường thì nguyên nhân không phải do lỗi phần cứng mà chính là việc bỏ qua một bước quan trọng: cấu hình PHY (Physical Layer). Khi không thiết lập đúng PHY, module Ethernet sẽ không “nói chuyện” hiệu quả với chipset Ethernet của Arduino, dẫn tới những vấn đề kết nối không ổn định mà nhiều nhà làm mạch còn bỏ quên.

Thực tế khi bỏ qua cấu hình PHY trong module Ethernet RJ45 cho Arduino khiến kết nối không ổn định
Tầm quan trọng của PHY trong hệ thống Ethernet
PHY là lớp vật lý chịu trách nhiệm chuyển đổi tín hiệu điện tử sang tín hiệu điện phân (và ngược lại) để truyền qua cáp RJ45. Trong một mô-đun Ethernet chuẩn như DP83848, PHY không chỉ chịu vai trò “cầu nối” mà còn thực hiện các chức năng:
- Đàm phán tốc độ: Xác định nhanh/chậm (10 Mbps hoặc 100 Mbps) dựa trên khả năng của mạng và thiết bị.
- Kỹ thuật tự động xoay chiều (auto‑negotiation) để đồng bộ hoá duplex (half hoặc full).
- Kiểm soát lỗi: Phát hiện các lỗi bit, jitter, hoặc mất đồng hồ.
- Quản lý năng lượng: Giảm tiêu thụ khi không truyền dữ liệu (low‑power mode).
Khi bất kỳ một trong những chức năng trên không được cấu hình phù hợp, mạng Ethernet sẽ không thể ổn định. Điều này giải thích vì sao một đoạn code ngắn “Ethernet.begin(mac, ip);” mà không thiết lập cấu hình PHY có thể gây ra lỗi “timeout” hoặc “disconnect”.
 để truyền qua cáp RJ45. (Ảnh 2)")
Những hậu quả thường gặp khi không cấu hình PHY đúng cách
Trong thực tiễn, việc bỏ qua cấu hình PHY thường dẫn đến một số hiện tượng sau, khiến các dự án IoT và các hệ thống nhúng gặp khó khăn.
- Gián đoạn kết nối ngẫu nhiên: Khi PHY không đồng bộ với switch hoặc router, dữ liệu có thể truyền đi được vài giây rồi đứt.
- Hiệu năng giảm mạnh: Máy tính sẽ tự hạ tốc độ xuống 10 Mbps ngay cả khi mạng hỗ trợ 100 Mbps, khiến thời gian phản hồi kéo dài.
- Lỗi checksum và packet loss: Không có cơ chế kiểm tra lỗi thích hợp, nên các gói tin bị hỏng không được phát lại.
- Không tương thích với các thiết bị mới: Các switch Gigabit hoặc các thiết bị sử dụng tính năng Power over Ethernet (PoE) yêu cầu PHY có khả năng thương thảo đúng chuẩn.
- Tiêu thụ điện năng không cần thiết: PHY ở chế độ “default” có thể luôn bật ở mức cao, ảnh hưởng đến thời gian hoạt động của dự án chạy pin.
Cách thiết lập PHY đúng cách trên Arduino
Dưới đây là quy trình từng bước để đảm bảo PHY được cấu hình hợp lý, giúp mạng Ethernet của bạn luôn “mượt mà”.
")
- Kiểm tra datasheet của PHY: Mỗi chip (ví dụ DP83848, W5500…) có các thanh ghi cấu hình riêng. Tìm hiểu các thanh ghi BMCR (Basic Mode Control Register) và PHYCR để biết cách bật auto‑negotiation.
- Khởi tạo giao tiếp SPI/I2C: Nếu mô-đun Ethernet dùng giao thức SPI (như W5500) hoặc I2C, cần khởi động bus trước khi ghi vào PHY.
- Ghi các thanh ghi quan trọng:
- Đặt bit AN_ENABLE để bật tự động thương thảo.
- Đặt bit RESET để khởi động lại PHY sau khi cấu hình.
- Chọn tốc độ mong muốn (10 Mbps hoặc 100 Mbps) nếu không muốn dựa vào auto‑negotiation.
- Kiểm tra trạng thái sau khi cấu hình: Đọc lại thanh ghi BMSR (Basic Mode Status Register) để xác nhận PHY đã “lock” vào chế độ mong muốn.
- Thử nghiệm thực tế: Gửi một loạt các packet ping hoặc dữ liệu TCP/UDP, quan sát thời gian trễ và số gói tin mất.
Việc lập trình này có thể được thực hiện thông qua thư viện Ethernet của Arduino, nhưng nếu sử dụng mô-đun không có driver sẵn, bạn sẽ cần tự viết hàm phyWrite(uint16_t reg, uint16_t value) và phyRead(uint16_t reg).
So sánh các mô-đun Ethernet phổ biến cho Arduino
Khi lựa chọn mô-đun Ethernet, không chỉ mức giá mà còn khả năng cấu hình PHY ảnh hưởng tới độ ổn định. Dưới đây là bảng so sánh nhanh giữa ba mô-đun thường dùng:
")
| Model | Chip PHY | Tốc độ hỗ trợ | Khả năng cấu hình PHY | Giá (VNĐ) |
|---|---|---|---|---|
| ENC28J60 | Microchip ENC28J60 | 10 Mbps | Không hỗ trợ auto‑negotiation; cố định | ~100.000 |
| W5500 | WIZnet W5500 | 10/100 Mbps | Có giao diện cấu hình, nhưng thường được thiết lập mặc định | ~150.000 |
| DP83848 (RJ45) | Texas Instruments DP83848 | 10/100 Mbps | Cho phép tùy chỉnh đầy đủ các thanh ghi PHY | ~194.638 (giá gốc) – 162.198 (giá giảm) |
Như bảng trên cho thấy, mô-đun DP83848 mang lại khả năng tùy biến PHY mạnh mẽ, thích hợp cho các dự án cần tối ưu tốc độ và độ tin cậy cao.
Lý do lựa chọn mô‑đun DP83848 cho dự án Arduino
DP83848 không chỉ đáp ứng nhu cầu kết nối nhanh chóng mà còn cung cấp các tính năng giúp việc cấu hình PHY trở nên trực quan. Một số ưu điểm nổi bật:
")
- Đa dạng chế độ giao tiếp: Hỗ trợ cả 3.3 V và 5 V, phù hợp hầu hết các board Arduino.
- Khả năng auto‑negotiation chuẩn: Tự động chọn tốc độ 10 Mbps hoặc 100 Mbps và chế độ duplex tối ưu.
- Thân thiện với lập trình: Các thanh ghi được tài liệu chi tiết, cộng với thư viện nguồn mở có sẵn.
- Giá cả hợp lý: Với mức giá 194.638 VNĐ (giá giảm còn 162.198 VNĐ), đây là lựa chọn cân bằng giữa chi phí và chất lượng.
- Độ ổn định khi làm việc liên tục: Có thể hoạt động trong dải nhiệt 0‑120 °C, thích hợp cho môi trường công nghiệp nhẹ.
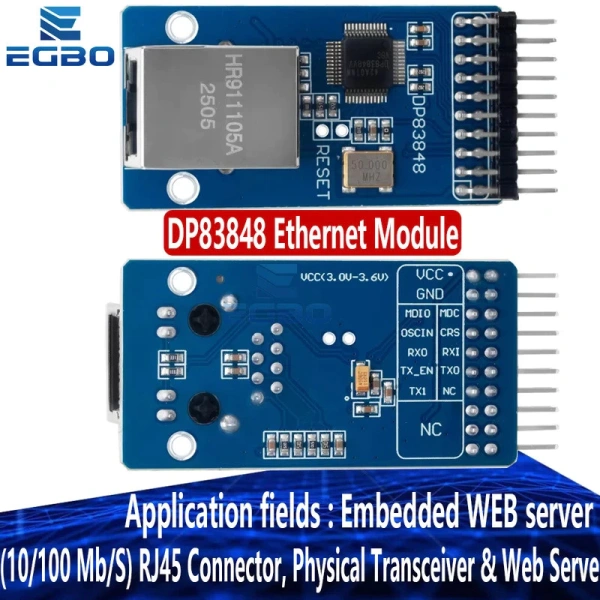
Đối với những ai đang tìm kiếm một mô-đun Ethernet có thể “tùy chỉnh PHY” cho Arduino, Mô-đun Ethernet DP83848 (10 / 100 Mb / S) là một giải pháp đáng cân nhắc. Bên cạnh việc cung cấp đầu nối RJ45 và bộ thu phát vật lý, mô-đun còn đi kèm một máy chủ web nhẹ, giúp bạn nhanh chóng triển khai giao diện điều khiển từ xa mà không cần viết code phức tạp.
Mẹo thực hành để tránh lỗi PHY khi triển khai dự án thực tế
Những kinh nghiệm dưới đây đã được kiểm chứng qua nhiều dự án nhúng, giúp bạn giảm thiểu rủi ro “kết nối không ổn định”.
- Kiểm tra nguồn cấp: Đảm bảo Arduino cung cấp ổn định 3.3 V cho DP83848; nếu dùng bộ chuyển đổi 5 V → 3.3 V, nên sử dụng LDO có độ rải điện thấp.
- Sử dụng cáp RJ45 chuẩn Cat5e hoặc cao hơn: Cáp yếu hoặc dài quá mức (trên 15 m) có thể gây suy hao tín hiệu, làm PHY mất “handshake”.
- Khởi động PHY sau khi MCU khởi tạo: Đặt một khoảng delay ngắn (≈10 ms) sau
Ethernet.begin()trước khi thực hiện giao tiếp mạng. - Giám sát trạng thái PHY qua LED: DP83848 cung cấp các chân LED (LINK, ACTIVITY); việc quan sát ánh sáng sẽ giúp nhanh chóng phát hiện lỗi vật lý.
- Cập nhật firmware nếu có: Một số nhà cung cấp sẽ phát hành bản sửa lỗi cho PHY; kiểm tra website nhà sản xuất để có bản cập nhật mới nhất.
Đánh giá thực tiễn: Khi nào nên “bỏ qua” cấu hình PHY và khi nào phải thiết lập chi tiết?
Trong một số dự án đơn giản như demo kết nối LAN tốc độ chậm, việc để PHY ở chế độ mặc định (auto‑negotiation tự động) có thể chấp nhận được. Tuy nhiên, khi yêu cầu:
- Thời gian phản hồi < 50 ms.
- Khả năng truyền dữ liệu liên tục (streaming sensor dữ liệu 10 KB/s).
- Hoạt động trong môi trường công nghiệp có nhiễu điện từ.
... thì việc cấu hình chi tiết PHY là bắt buộc. Thiết lập cố định tốc độ và duplex sẽ giảm thiểu thời gian thương thảo, đồng thời tránh xung đột với các thiết bị mạng khác.
Với các thông tin trên, hy vọng bạn đã hiểu rõ thực tế và các rủi ro khi bỏ qua cấu hình PHY trong module Ethernet RJ45 cho Arduino. Bằng cách chú trọng vào việc thiết lập PHY đúng cách, việc triển khai các ứng dụng IoT, hệ thống giám sát, hoặc web server trên Arduino sẽ trở nên ổn định và hiệu quả hơn rất nhiều.
Bạn thấy bài viết này hữu ích không?
Chưa có đánh giá nào
Hãy là người đầu tiên đánh giá bài viết này