Hướng dẫn lắp ráp và tối ưu hoá Đế Động Cơ Đa Năng BOOCEAN cho drone E88/E99
Bài viết chi tiết từng bước lắp ráp Đế Động Cơ Đa Năng BOOCEAN cho các mẫu drone E88 và E99, kèm mẹo tối ưu hoá hiệu năng và bảo trì lâu dài. Độc giả sẽ nắm rõ các lưu ý kỹ thuật để đảm bảo độ ổn định khi bay.
Đăng ngày 10 tháng 6, 2026

Đánh giá bài viết
Chưa có đánh giá nào
Hãy là người đầu tiên đánh giá bài viết này
Mục lục›
Trong cộng đồng người đam mê drone, việc tối ưu hoá các bộ phận cơ khí luôn là một trong những yếu tố quyết định khả năng bay ổn định và thời gian sử dụng lâu dài. Đối với các mẫu drone E88 và E99, đế động cơ đa năng BOOCEAN đã trở thành một phụ kiện được nhiều người lựa chọn nhờ thiết kế linh hoạt và khả năng thích ứng với nhiều kiểu cấu hình. Bài viết dưới đây sẽ hướng dẫn chi tiết cách lắp ráp đế động cơ này, đồng thời đề xuất một số phương pháp tối ưu hoá nhằm giảm rung, cân bằng trọng lượng và nâng cao độ bền của máy.
Trước khi bắt đầu, người đọc cần nắm rõ các yếu tố ảnh hưởng đến quá trình lắp đặt, bao gồm độ tương thích của đế với khung máy, các công cụ cần chuẩn bị, và các bước kiểm tra an toàn sau khi hoàn thành. Khi thực hiện đúng quy trình, không chỉ giúp drone đạt được hiệu suất tối ưu mà còn giảm thiểu rủi ro hư hỏng trong quá trình vận hành.
Khái quát về đế động cơ đa năng BOOCEAN
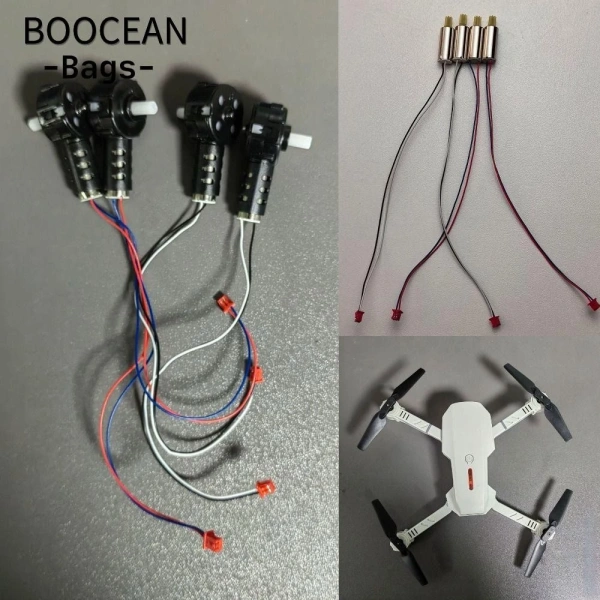
Đế động cơ BOOCEAN được thiết kế đặc biệt cho dòng drone E88 và E99, với chín kiểu màu đen khác nhau đáp ứng nhu cầu thẩm mỹ và tính năng riêng. Cấu trúc của đế gồm các khớp nối bằng nhôm cao cấp, các ốc vít có tiêu chuẩn công nghiệp, và các lỗ gắn phụ kiện hỗ trợ việc lắp đặt các bộ phận như cánh quạt, ống dẫn khí, cũng như hệ thống giảm chấn.
Nhờ tính năng đa năng, người dùng có thể thay đổi vị trí gắn động cơ, thay đổi góc nghiêng và thậm chí gắn thêm các cảm biến phụ trợ mà không cần thay đổi toàn bộ khung. Điều này tạo điều kiện thuận lợi cho việc tùy chỉnh cấu hình bay tùy theo mục đích sử dụng, từ quay video ổn định đến thực hiện các pha bay mạo hiểm.
Chuẩn bị dụng cụ và phụ kiện cần thiết
Danh sách công cụ cơ bản
- Tuốc nơ vít mũi thẳng (đầu 2.5mm và 3mm) – dùng để siết ốc trên đế.
- Nhíp nhọn – hỗ trợ trong việc cầm nắm các chi tiết nhỏ.
- Thước đo độ dài – kiểm tra khoảng cách giữa các lỗ gắn.
- Keo dán epoxy nhẹ – dùng trong một số trường hợp cần cố định phụ kiện phụ trợ.
- Thước cân điện tử – để cân chỉnh trọng lượng sau khi lắp ráp.
Phụ kiện đi kèm với đế
- 9 mẫu đế màu đen (đủ cho cả E88 và E99).
- Set ốc vít tiêu chuẩn M2 và M3.
- Các kẹp giảm chấn dạng silicon.
- Bộ hướng dẫn lắp ráp bằng hình ảnh.
Quy trình lắp ráp chi tiết
Bước 1: Kiểm tra và chuẩn bị khung máy
Đầu tiên, đặt khung drone E88/E99 trên một bề mặt phẳng, loại bỏ các phụ kiện cũ nếu có. Kiểm tra các lỗ gắn trên khung xem có bụi bẩn hay mảnh vụn nào không; nếu có, dùng cọ mềm hoặc khí nén để làm sạch. Đảm bảo rằng các lỗ gắn trên khung khớp hoàn toàn với các lỗ trên đế động cơ BOOCEAN.
Bước 2: Gắn đế vào khung
Đặt đế động cơ lên vị trí dự kiến, căn chỉnh sao cho các lỗ vít trên đế trùng khớp với lỗ trên khung. Dùng tay nhẹ nhấn để cố định tạm thời, sau đó dùng tuốc nơ vít siết chặt các ốc vít theo thứ tự chéo (đầu tiên là góc trên bên trái, rồi sang góc dưới bên phải, tiếp tục luân phiên). Việc siết chặt theo thứ tự chéo giúp tránh hiện tượng lệch trục.
Bước 3: Lắp đặt động cơ
Đặt động cơ vào vị trí gắn trên đế, chú ý đến hướng quay (thông thường, động cơ phải quay ngược chiều kim đồng hồ ở phía trước và cùng chiều kim đồng hồ ở phía sau). Đảm bảo rằng trục động cơ thẳng hàng với lỗ trung tâm trên đế, sau đó siết chặt các ốc vít giữ động cơ. Khi siết, không nên siết quá chặt vì có thể làm hỏng ren.
Bước 4: Gắn cánh quạt và hệ thống giảm chấn
Gắn cánh quạt vào trục động cơ, nhớ kiểm tra chiều quay đúng hướng để tránh mất cân bằng. Đối với các mẫu cánh quạt có lỗ lắp giảm chấn, đặt kẹp silicone vào vị trí trước khi siết chặt cánh quạt. Kẹp giảm chấn giúp hấp thụ một phần rung động, giảm tải lên khung và cải thiện độ bền.
Bước 5: Kiểm tra lại toàn bộ kết nối
Sau khi hoàn thành việc gắn các thành phần, tiến hành kiểm tra lại mọi ốc vít và kẹp. Dùng tuốc nơ vít nhẹ nhàng vặn lại các ốc đã siết để đảm bảo không còn lỏng. Đối với các phụ kiện điện như cáp nguồn, kiểm tra xem chúng có được gắn chắc chắn và không bị gập hay chệch.
Phương pháp tối ưu hoá sau khi lắp ráp
Cân bằng trọng lượng
Để đạt được độ ổn định tối đa, việc cân bằng trọng lượng giữa các cánh quạt là rất quan trọng. Dùng thước cân điện tử để đo trọng lượng từng cánh quạt, sau đó so sánh và điều chỉnh bằng cách thay đổi vị trí các linh kiện phụ trợ (như pin, camera) sao cho tổng trọng lượng ở mỗi góc quay gần bằng nhau. Khi trọng lượng không đồng đều, drone sẽ có xu hướng lệch và gây rung trong quá trình bay.
Giảm rung bằng vật liệu giảm chấn
BOOCEAN cung cấp các kẹp giảm chấn bằng silicon có độ dẻo vừa phải. Đặt kẹp này vào vị trí giữa đế và khung, hoặc trực tiếp dưới trục động cơ nếu có không gian. Ngoài ra, một số người dùng còn sử dụng băng dính cao su mỏng để bọc quanh các ốc vít, giảm thiểu tiếng ồn và rung động khi máy bay di chuyển.
Tối ưu hoá góc nghiêng của động cơ
Đối với các nhiệm vụ quay video, việc điều chỉnh góc nghiêng (tilt) của động cơ giúp giảm hiện tượng dao động góc quay. Thông thường, góc nghiêng khoảng 2-3 độ so với trục thẳng đứng là đủ để cân bằng lực đẩy và giảm hiện tượng “gợn sóng”. Khi điều chỉnh, nên thực hiện từng bước một và kiểm tra bằng phần mềm cân bằng (flight controller) để xác nhận giá trị mới.
Kiểm tra và tinh chỉnh cài đặt flight controller
Sau khi lắp ráp, việc đồng bộ các thông số trên flight controller với cấu hình mới là bước không thể bỏ qua. Người dùng cần mở phần mềm cấu hình, nhập lại giá trị “motor layout” (định dạng X hoặc +) và thực hiện quá trình calibration lại các cảm biến gia tốc, con quay hồi chuyển. Khi các thông số được cập nhật đúng, drone sẽ phản hồi nhanh chóng và chính xác hơn.
Kiểm tra an toàn trước khi bay
Trước khi đưa drone vào không gian bay, người dùng nên thực hiện một loạt kiểm tra nhanh:
- Kiểm tra lại tất cả các ốc vít và kẹp đã siết chặt.
- Đảm bảo không có dây cáp nào bị lỏng hoặc chạm vào các bộ phận quay.
- Kiểm tra độ cân bằng của cánh quạt bằng cách quay tay nhẹ và cảm nhận có rung hay không.
- Thực hiện một lần thử nghiệm bay ngắn ở độ cao thấp, quan sát phản hồi của máy và ghi nhận bất kỳ hiện tượng rung lạ nào.
Nếu phát hiện bất kỳ vấn đề nào trong quá trình thử nghiệm, người dùng nên dừng lại và kiểm tra lại các bước lắp ráp, thay vì tiếp tục bay và gây hư hại.
Bảo trì định kỳ cho đế động cơ BOOCEAN
Để duy trì hiệu suất ổn định, việc bảo trì định kỳ là điều cần thiết. Một lịch bảo trì cơ bản có thể bao gồm:
- Kiểm tra độ chặt của ốc vít mỗi 10-15 giờ bay.
- Làm sạch bề mặt đế bằng cọ mềm và khí nén để loại bỏ bụi bẩn tích tụ.
- Thay kẹp giảm chấn nếu phát hiện dấu hiệu mòn hoặc mất tính đàn hồi.
- Kiểm tra độ mòn của trục động cơ và thay thế nếu có vết trầy xước sâu.
Việc thực hiện các bước trên sẽ giúp giảm thiểu nguy cơ hỏng hóc đột xuất và kéo dài tuổi thọ của cả đế và động cơ.
Phổ biến các vấn đề gặp phải và cách khắc phục
Rung mạnh khi bay
Nguyên nhân thường là do không cân bằng cánh quạt hoặc ốc vít chưa siết chặt đủ. Kiểm tra lại cân bằng mỗi cánh quạt bằng thước cân, sau đó siết chặt lại các ốc vít và thay kẹp giảm chấn nếu cần.
Động cơ không nhận tín hiệu
Kiểm tra kết nối dây nguồn từ flight controller đến ESC (Electronic Speed Controller). Đảm bảo rằng các đầu cắm không bị lỏng và không có dấu hiệu cháy hoặc hỏng.
Pin nhanh hết năng lượng
Một nguyên nhân tiềm ẩn là trọng lượng không đồng đều gây tăng công suất tiêu thụ. Thực hiện cân bằng lại trọng lượng và tối ưu hoá góc nghiêng của động cơ để giảm tải lên pin.
Những câu hỏi thường gặp khi lắp đặt đế BOOCEAN
- Đế BOOCEAN có phù hợp với các mẫu drone ngoài E88/E99 không? – Đế được thiết kế đặc thù cho các khung E88 và E99; việc lắp trên các mẫu khác có thể gặp khó khăn trong việc khớp lỗ và độ ổn định.
- Có cần sử dụng keo epoxy để cố định đế không? – Trong hầu hết các trường hợp, việc siết chặt ốc vít đủ mạnh đã đáp ứng yêu cầu; keo chỉ nên dùng khi có yêu cầu đặc biệt về giảm rung hoặc bảo vệ khỏi rung động mạnh.
- Làm sao để kiểm tra độ lệch trục sau khi lắp? – Dùng thước cân để đo khoảng cách từ trục động cơ đến bề mặt khung ở bốn hướng; các giá trị nên gần như bằng nhau, nếu không cần điều chỉnh vị trí đế.
Việc lắp ráp và tối ưu hoá đế động cơ đa năng BOOCEAN cho drone E88/E99 không chỉ là một quy trình kỹ thuật mà còn là cơ hội để người dùng hiểu sâu hơn về cơ cấu máy bay, từ đó nâng cao kỹ năng bảo trì và tùy chỉnh. Khi áp dụng các phương pháp giảm rung, cân bằng trọng lượng và kiểm tra an toàn một cách có hệ thống, người dùng sẽ cảm nhận được sự khác biệt rõ rệt trong trải nghiệm bay: độ ổn định cao hơn, phản hồi nhanh hơn và thời gian hoạt động kéo dài hơn. Những kiến thức này không chỉ hữu ích cho việc sử dụng hiện tại mà còn mở rộng tiềm năng cho các dự án nâng cấp hoặc chế tạo drone trong tương lai.
Bạn thấy bài viết này hữu ích không?
Chưa có đánh giá nào
Hãy là người đầu tiên đánh giá bài viết này