Hướng dẫn lắp ráp và cấu hình bộ Tx Rx Flycam E88/E99 S1S F198 XD2 của New Zin
Bài viết cung cấp hướng dẫn từng bước để lắp ráp, kết nối và cấu hình bộ Tx Rx Flycam E88/E99 S1S F198 XD2. Bạn sẽ nắm rõ cách thiết lập kênh, cân chỉnh độ nhạy và kiểm tra hoạt động trước khi bay, giúp tối ưu hiệu suất điều khiển.
Đăng ngày 8 tháng 6, 2026
Đánh giá bài viết
Chưa có đánh giá nào
Hãy là người đầu tiên đánh giá bài viết này
Mục lục›
Trong thời đại drone đang ngày càng trở nên phổ biến, việc lựa chọn một bộ điều khiển Tx Rx phù hợp và biết cách lắp ráp, cấu hình chính xác là yếu tố then chốt để đạt được trải nghiệm bay ổn định và an toàn. Bài viết này sẽ hướng dẫn chi tiết quy trình lắp ráp và cấu hình bộ Tx Rx Flycam E88/E99 S1S F198 XD2 của New Zin, một trong những giải pháp được nhiều người dùng ưa chuộng nhờ khả năng tương thích đa dạng và độ tin cậy cao.
Trước khi bắt đầu, chúng ta sẽ cùng nhìn lại những thành phần cơ bản của bộ điều khiển, các công cụ cần chuẩn bị, và những lưu ý quan trọng khi thực hiện các bước lắp ráp. Nhờ vào hướng dẫn chi tiết, ngay cả những người mới lần đầu tiếp xúc với drone cũng có thể tự tin hoàn thiện quá trình lắp đặt mà không gặp rắc rối.
Giới thiệu tổng quan về bộ Tx Rx Flycam E88/E99 S1S F198 XD2
Bộ Tx Rx Flycam E88/E99 S1S F198 XD2 được New Zin thiết kế để đáp ứng nhu cầu điều khiển các mẫu flycam phổ biến như E88, E99, S1S, F198 và XD2. Sản phẩm bao gồm một bộ phát (Tx) và một bộ thu (Rx) được tích hợp trên cùng một bo mạch, giúp giảm thiểu độ trễ và tăng độ ổn định khi truyền tín hiệu.
Những điểm nổi bật của bộ điều khiển này bao gồm:
- Khoảng cách truyền tín hiệu lên tới 500 m trong môi trường mở.
- Hỗ trợ đa kênh, cho phép người dùng tùy chỉnh các chế độ bay như mode 1 và mode 2.
- Thiết kế bo mạch mỏng nhẹ, dễ lắp đặt trên các khung máy bay.
- Khả năng tương thích với các bộ nhận tín hiệu tiêu chuẩn trên thị trường.
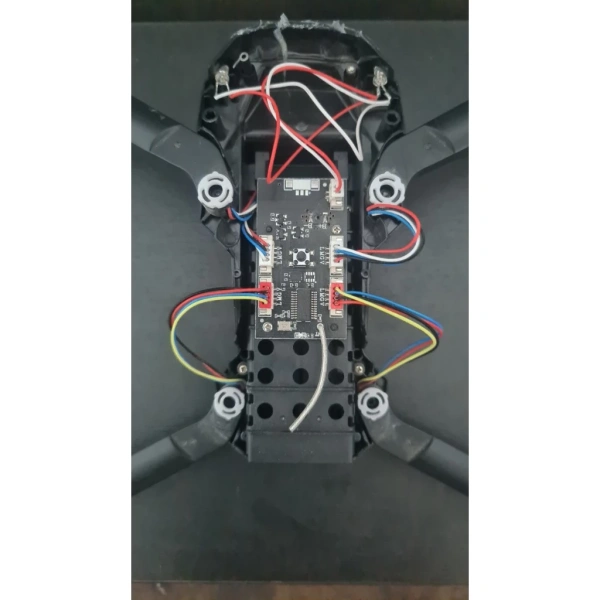
Các thành phần chính của bộ Tx Rx
Để hiểu rõ cách lắp ráp, chúng ta cần nắm bắt từng thành phần cấu thành bộ điều khiển:
- Bo mạch Tx: chứa bộ phát RF, bộ xử lý tín hiệu và cổng kết nối cho anten.
- Bo mạch Rx: tích hợp bộ thu RF, bộ giải mã và các chân ra PWM cho các kênh điều khiển.
- Khung gắn kết: thường là khung nhựa hoặc kim loại, dùng để cố định bo mạch trên máy bay.
- Đầu nối và cáp nguồn: bao gồm cáp 3‑pin hoặc 5‑pin dùng để cấp điện và truyền tín hiệu PWM từ bộ điều khiển tới bộ nhận.
- Anten: anten phát và thu, thường là loại dải 2.4 GHz, cần được gắn đúng hướng để tối ưu hoá độ mạnh tín hiệu.
Chuẩn bị trước khi lắp ráp
Việc chuẩn bị kỹ lưỡng các dụng cụ và môi trường làm việc sẽ giúp quá trình lắp ráp diễn ra suôn sẻ hơn. Dưới đây là danh sách những vật dụng cần có:
- Máy hàn và hàn chì phù hợp (nếu cần hàn lại các chân nối).
- Tuốc nơ vít nhỏ (thường là loại Phillips #00).
- Kìm nhíp và kìm cắt dây.
- Dụng cụ đo điện áp (multimeter) để kiểm tra nguồn cung cấp.
- Thước đo độ dài dây cáp (nếu cần cắt và nối lại).
- Găng tay bảo vệ để tránh chạm vào các thành phần điện tử nhạy cảm.
Đồng thời, môi trường làm việc nên được duy trì sạch sẽ, tránh bụi bẩn và tĩnh điện. Đối với người chưa quen với việc hàn mạch, nên thực hành trên một mạch mẫu trước khi thực hiện trên bộ Tx Rx thực tế.
Quy trình lắp ráp từng bước
Bước 1: Kiểm tra toàn bộ linh kiện
Trước khi bắt đầu, hãy mở hộp và so sánh danh sách linh kiện với thực tế. Đảm bảo bo mạch Tx, bo mạch Rx, anten, dây cáp và các phụ kiện khác đều có mặt và không bị hỏng. Nếu phát hiện bất kỳ thành phần nào bị lỗi, nên liên hệ với nhà cung cấp để thay thế ngay.
Bước 2: Gắn anten lên bo mạch
Anten cần được gắn chắc chắn vào các cổng kết nối RF trên bo mạch Tx và Rx. Khi gắn, chú ý hướng anten sao cho phía mở rộng hướng ra ngoài, tránh để anten chạm vào các bộ phận kim loại của khung máy bay, vì điều này có thể gây nhiễu tín hiệu.
Bước 3: Lắp bo mạch Tx vào khung điều khiển
Bo mạch Tx thường được gắn vào vị trí phía trên của tay điều khiển (remote). Sử dụng các ốc vít đi kèm để cố định bo mạch vào khung, đảm bảo không có độ rung hoặc lỏng lẻo khi di chuyển tay điều khiển.
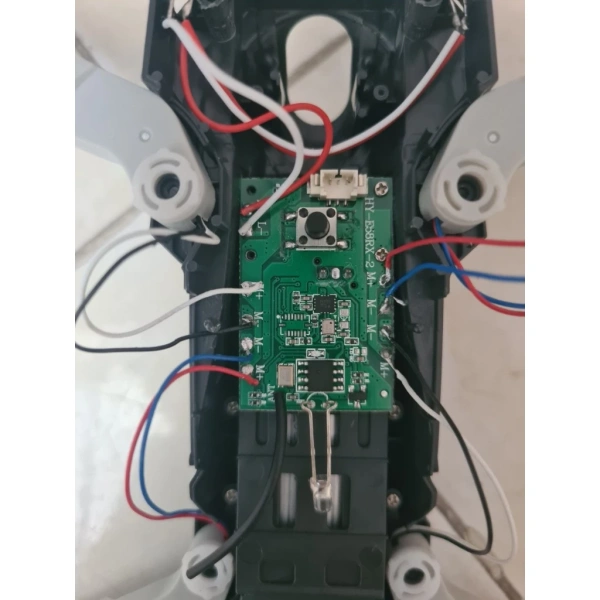
Bước 4: Kết nối dây nguồn và dây PWM
Dây nguồn thường có màu đỏ (dương) và màu đen (âm). Kết nối chúng vào cổng nguồn của bo mạch Tx và Rx theo đúng ký hiệu. Đối với dây PWM, mỗi kênh (thường có 4‑6 kênh) sẽ được nối tới các chân ra trên bo mạch Rx, sau đó kết nối tới bộ nhận tín hiệu trên flycam. Đảm bảo các đầu nối không bị lỏng và không chập mạch.
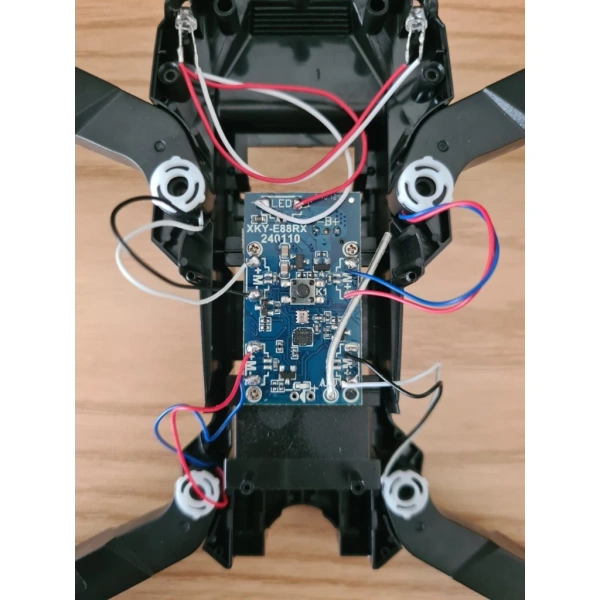
Bước 5: Lắp bo mạch Rx vào khung máy bay
Vị trí lắp đặt bo mạch Rx thường ở phần trung tâm của khung flycam, gần trung tâm trọng tâm để cân bằng trọng lượng. Sử dụng các ốc vít hoặc keo dán chuyên dụng để cố định, tránh gây rung động trong quá trình bay.
Bước 6: Kiểm tra kết nối và nguồn điện
Sau khi hoàn thành các bước trên, sử dụng multimeter để đo điện áp trên các cổng nguồn. Đảm bảo điện áp cung cấp cho bo mạch Tx và Rx nằm trong khoảng quy định (thường là 5 V hoặc 7.4 V tùy model). Kiểm tra lại các kết nối PWM bằng cách bật nguồn và quan sát phản hồi trên tay điều khiển.

Cấu hình kênh và tần số truyền
Việc cấu hình đúng kênh và tần số là yếu tố quyết định độ ổn định của tín hiệu khi bay. Các bước thực hiện như sau:
Chọn tần số truyền phù hợp
Bo mạch Tx Rx thường hỗ trợ tần số 2.4 GHz với các kênh 1‑8. Để giảm thiểu nhiễu từ các thiết bị khác, người dùng nên chọn kênh ít được sử dụng trong khu vực bay, ví dụ kênh 3 hoặc 5. Khi thay đổi kênh, hãy thực hiện đồng thời trên cả bo mạch Tx và Rx để đảm bảo chúng đồng bộ.
Thiết lập chế độ bay (mode)
Flycam E88/E99 thường hỗ trợ hai chế độ điều khiển: mode 1 (cánh tay trái điều khiển độ cao và quay, cánh tay phải điều khiển hướng) và mode 2 (ngược lại). Đối với mỗi chế độ, cần thiết lập các giá trị trung lập (trim) sao cho khi tay điều khiển ở vị trí trung tâm, flycam không di chuyển. Việc này thường thực hiện qua menu cài đặt trên bộ điều khiển hoặc bằng cách điều chỉnh các trim trực tiếp trên Tx.
Kiểm tra độ trễ và độ chính xác của các kênh
Để đánh giá độ trễ, người dùng có thể bật chế độ “test” trên Tx, sau đó di chuyển từng cần điều khiển và quan sát phản hồi trên flycam. Nếu phát hiện có kênh nào chậm hoặc không phản hồi, có thể cần kiểm tra lại dây nối hoặc thực hiện hiệu chỉnh lại trim.

Cài đặt chế độ bay và các thông số quan trọng
Sau khi đã cấu hình kênh và tần số, việc thiết lập các thông số bay chi tiết sẽ giúp tối ưu hoá trải nghiệm.
Thiết lập giới hạn góc nghiêng (angle limit)
Đối với các flycam như E88, việc giới hạn góc nghiêng tối đa (thường từ 30°‑45°) giúp tránh trường hợp máy bay mất kiểm soát khi di chuyển quá nhanh. Thông số này thường được thiết lập trong phần “angle limit” trên Tx, và có thể điều chỉnh tùy theo kỹ năng của người lái.
Thiết lập tốc độ tối đa (max speed)
Máy bay camera thường có tốc độ tối đa từ 30‑60 km/h. Người dùng có thể giảm tốc độ tối đa để tăng thời gian bay và độ an toàn, đặc biệt khi bay trong khu vực có nhiều chướng ngại vật. Thông số này thường nằm trong mục “speed limit” trên Tx.
Chế độ “failsafe” và “return‑to‑home”
Mặc dù các mẫu flycam E88/E99 không có GPS, nhưng bộ Tx Rx vẫn hỗ trợ chế độ “failsafe” – tự động hạ cánh hoặc giữ độ cao khi mất tín hiệu. Người dùng cần thiết lập thời gian trễ (thường từ 1‑2 giây) và độ cao hạ cánh dự phòng. Khi cấu hình đúng, chế độ này sẽ giảm thiểu rủi ro mất máy.
Kiểm tra và hiệu chỉnh sau lắp ráp
Sau khi hoàn thiện lắp ráp và cấu hình, việc kiểm tra lại toàn bộ hệ thống trước khi bay là bước không thể bỏ qua.
Kiểm tra tín hiệu truyền
Đặt flycam trên một bề mặt phẳng, bật nguồn và bật Tx. Kiểm tra chỉ báo LED trên bo mạch Rx – thường có màu xanh khi nhận tín hiệu mạnh và màu đỏ khi tín hiệu yếu. Nếu nhận được tín hiệu yếu, hãy thử thay đổi vị trí anten hoặc chuyển sang kênh khác.
Thử nghiệm các chế độ điều khiển
Thực hiện một số thao tác cơ bản như tăng/giảm độ cao, quay trái/phải, di chuyển về phía trước và phía sau. Quan sát phản hồi của flycam, đảm bảo không có hiện tượng rung lắc hoặc chệch hướng. Nếu có, kiểm tra lại trim và cân bằng trọng lượng máy bay.
Kiểm tra thời gian bay và thời gian sạc
Mặc dù không phải là thông tin tài chính hay đầu tư, việc biết thời gian bay ước tính (thường từ 8‑12 phút) và thời gian sạc pin (khoảng 45‑60 phút) sẽ giúp người dùng lên kế hoạch sử dụng hợp lý. Thực tế có thể thay đổi tùy vào tải trọng và điều kiện thời tiết.
Một số lưu ý khi sử dụng và bảo dưỡng
Để duy trì hiệu suất lâu dài, người dùng cần chú ý những điểm sau:
- Kiểm tra kết nối anten thường xuyên: Đảm bảo anten không bị lỏng hoặc gãy, vì bất kỳ sự thay đổi nào đều có thể làm giảm độ mạnh tín hiệu.
- Vệ sinh bo mạch: Sử dụng cồn isopropyl 70% để lau sạch bụi bẩn trên bề mặt mạch, tránh gây ra hiện tượng chập mạch.
- Kiểm tra pin: Trước mỗi lần bay, hãy đo điện áp còn lại của pin, tránh sử dụng pin đã hết sức mạnh, vì điều này có thể ảnh hưởng đến nguồn cung cấp cho bo mạch Tx và Rx.
- Tránh môi trường ẩm ướt: Mặc dù bo mạch được thiết kế chịu được độ ẩm vừa phải, việc bay trong mưa mạnh có thể gây hỏng linh kiện điện tử.
- Lưu trữ đúng cách: Khi không sử dụng, nên đặt bộ điều khiển và flycam vào túi chống sốc, tránh va đập mạnh và nhiệt độ quá cao.
Những lưu ý trên không chỉ giúp tăng tuổi thọ của thiết bị mà còn góp phần duy trì độ ổn định của tín hiệu trong mỗi lần bay.
Với các bước lắp ráp và cấu hình được trình bày chi tiết, người dùng sẽ có được một bộ Tx Rx Flycam E88/E99 S1S F198 XD2 hoạt động ổn định, đáp ứng nhu cầu quay video và chụp ảnh từ trên không. Việc thực hiện đúng quy trình không chỉ giúp tránh các sự cố không mong muốn mà còn nâng cao trải nghiệm bay, cho phép người dùng tận hưởng những khoảnh khắc tuyệt vời trên không một cách an toàn và hiệu quả.
Bạn thấy bài viết này hữu ích không?
Chưa có đánh giá nào
Hãy là người đầu tiên đánh giá bài viết này